Augmenting Human Performance with an XR Agent Learning from Online Behavior and BCI Evidence
Ziheng Li, Xichen He, Haoyan Chen, Charlie Zou, Sheng Bai, Benjamin Yang, Mengyuan Wu, Jake Ledner, Yi-Jie Cheng, Akito Yamauchi, Dishita G. Turakhia, Steven Feiner, and Paul Sajda
In ACM Symposium on User Interface Software and Technology (UIST), 2026
We present OLIVE, a framework for adapting a foundation model to provide real-time assistance in temporally demanding, high-stakes and dynamic tasks. OLIVE learns from both explicit behavioral signals (user actions) and implicit physiological signals (fixation-locked EEG) to provide timely guidance to supplement the user’s perceptual and action bandwidth. By fusing these complementary channels, OLIVE continuously adapts a frozen vision-language model’s belief about which items are currently task-relevant, jointly estimating per-source reliability without manual labels or offline retraining. Through three user studies, where we deploy an assistive agent driven by OLIVE in XR, we show that OLIVE outperforms prior test-time adaptation frameworks in both convergence time and rate. Compared to learning from explicit behaviors alone, the agent combining implicit and explicit learning signals improves user performance, achieving 45% more target coverage. When targets shift silently mid-block, the combined agent re-adapts 2.1x faster than the behavioral-only baseline. These results show OLIVE can be built toward empowering adaptive co-pilot systems that extend human performance under demanding operational conditions.
 Augmenting Human Performance with an XR Agent Learning from Online Behavior and BCI EvidenceIn ACM Symposium on User Interface Software and Technology (UIST), 2026
Augmenting Human Performance with an XR Agent Learning from Online Behavior and BCI EvidenceIn ACM Symposium on User Interface Software and Technology (UIST), 2026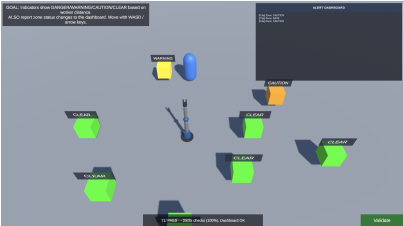 A Messaging Toolkit for Spatial Hierarchical Routing in Interactive ApplicationsIn ACM Symposium on User Interface Software and Technology (UIST), 2026
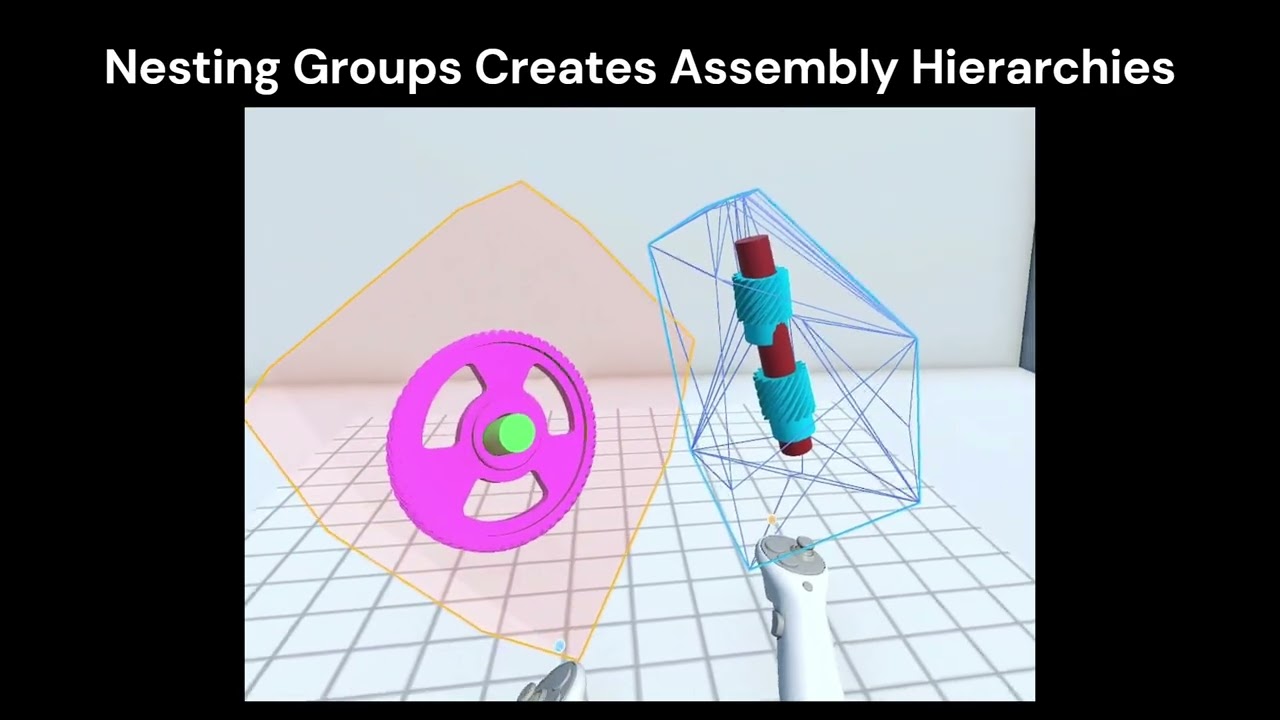
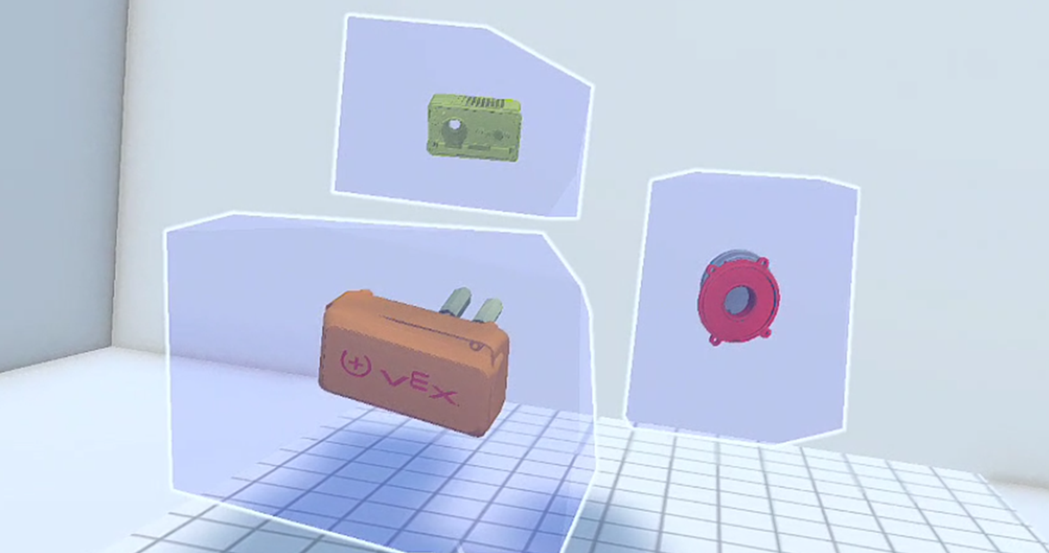
A Messaging Toolkit for Spatial Hierarchical Routing in Interactive ApplicationsIn ACM Symposium on User Interface Software and Technology (UIST), 2026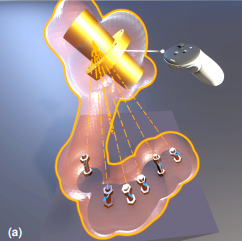 Delegate the Details: Flexible Assembly Constraint Authoring for Collaborative XRIn IEEE International Symposium on Mixed and Augmented Reality (ISMAR), 2026
Delegate the Details: Flexible Assembly Constraint Authoring for Collaborative XRIn IEEE International Symposium on Mixed and Augmented Reality (ISMAR), 2026